Proyecto KUKA

Indice :
1.Descripción del proceso.
2.Elementos utilizados.
3.Sistemas de seguridad
4.Funcionamiento de la célula robotizada.
5.Programación de la célula robotizada.
6.Simulación de la célula robotizada
7.Archivos descargables.
1.Descripción del proceso.
Este proceso realizara la colocación y la medición de un parabrisas de una coche. Este proceso sera robotizado para reducir el tiempo de colocación de este.
2.Elementos utiliza
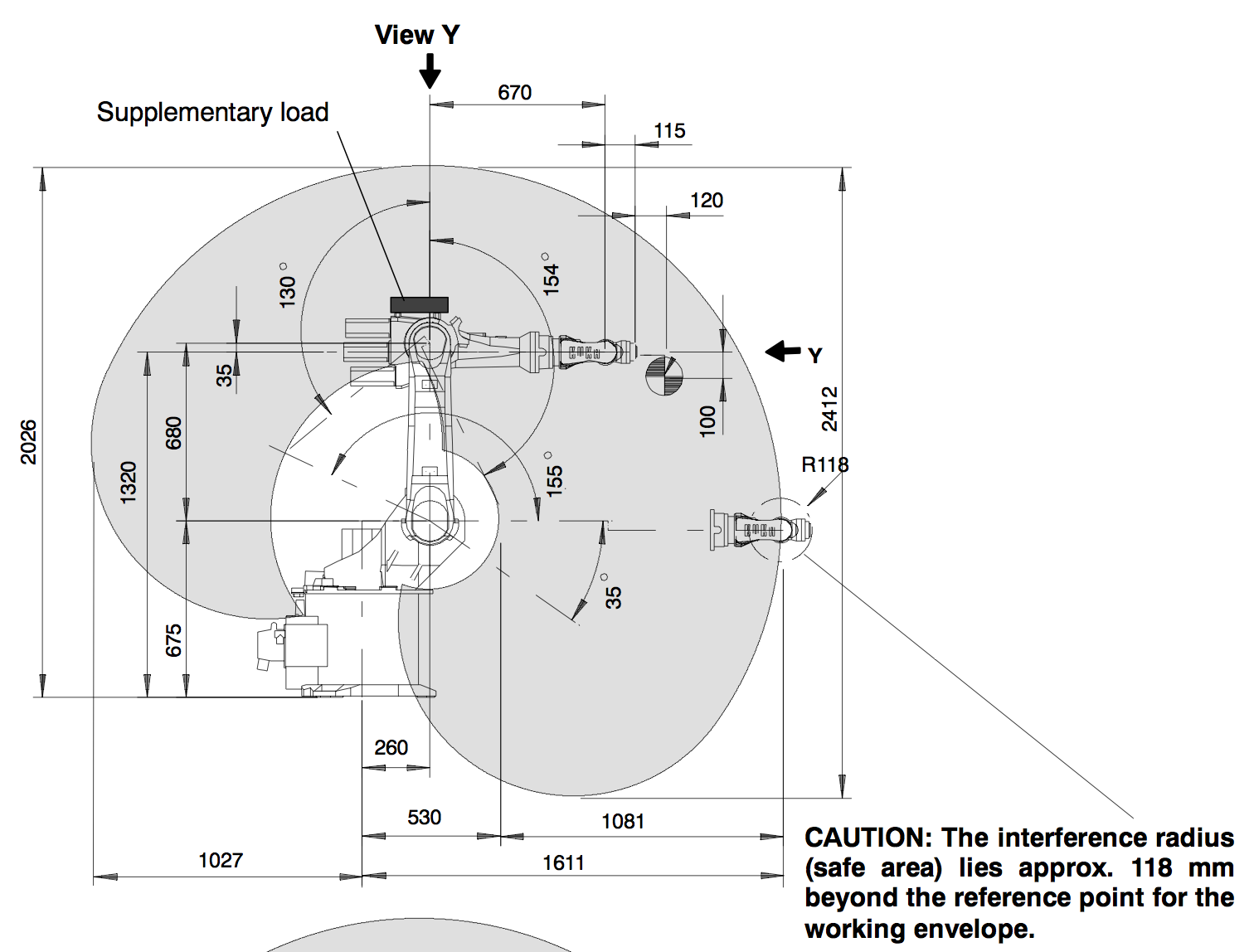
1- KUKA KR 200 L170 Comp ( 2 Und ).

Área de funcionamiento : El arela la cual sera donde se pueda mover el robot .
2-Armario de control
Es el cerebro del robot .En ella se sitúan los servo controladores que manejan los motores ejes,la CPU y la tarjetas de entrada/salidas exteriores y de seguridad .

2-Inyector de pegamento

3-Elemento para transportar del vehículo

4-Cinta transportadora para el parabrisas

5-Ventosa

6-Elemento de visión

7-Barrera fotoeléctrica

9-Pilares

10-Puerta de seguridad

11-Botonera

3.Sistemas de seguridad
1-Seta de emergencia : La seta de emergencia nos permitirá detener el procesa en caso de avería o fallo del sistema.
2-PLC de seguridad : El PLC de seguridad es el encargado mas importante de la seguridad dado que controla todas las señales que mandamos y recibimos del robot.

3-Señalización : Para la la visualización de cualquier error o fallo utilizaremos unas balizas las cuales nos avisaran de formar visual y a través de colores o que esta ocurriendo.

4-Celda de seguridad: La celda se encuentra completamente valla,lo cual impide el acceso a esta. Solo se puede entrar a través de una puerta con cierre de seguridad que se bloqueara cuando comienza el proceso, en caso de que se abra el proceso se detendrá inmediatamente

5.Programación de la célula robotizada.


6. Simulación de la célula robotizada.
7.Archivos para descargar:
Enlace programa:
Enlaces robot cámara:
Enlace dat:
Enlace src:
Enlaces robot ventosa:
Enlace dat:
Enlace src:
No hay comentarios:
Publicar un comentario